Controls Projects
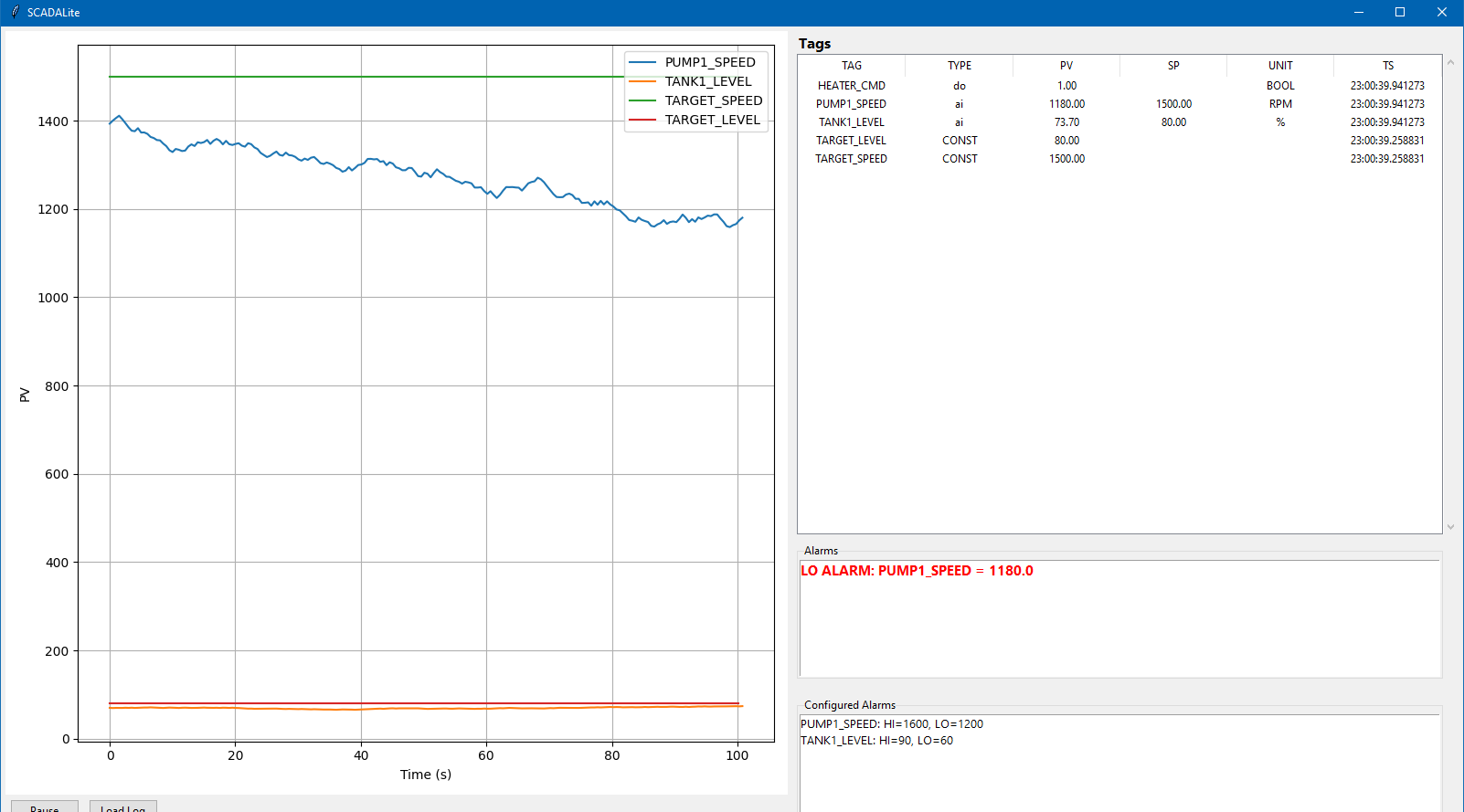
SCADALite: A Lightweight Python based SCADA Dashboard (2025 - 2026)
- Developed a lightweight Python-based SCADA dashboard for real-time telemetry visualization, alarm monitoring, serial/COM device integration, and historical data trending.
Self Balancing 2 Wheel Driveable Bluetooth Robot (2025 April - 2025 May)
-
Built a self-balancing, rideable two-wheel robot powered by an Arduino Nano 33 BLE Sense
-
Implemented a real-time PID stabilization system for dynamic balance correction
-
Developed firmware with runtime-tunable PID parameters for rapid iteration and optimization using Arduino CLI
-
Added Bluetooth-based remote control and PID adjustment through a Flutter mobile app
-
Implemented lightweight SCADA style real-time monitoring tool built in Python.
Click to show Arduino code
#include <Wire.h>
#include <Adafruit_AS5600.h>
#include <Arduino_BMI270_BMM150.h>
#include "mbed.h"
#include <ArduinoBLE.h>
#include <string.h>
#define TCA_ADDR 0x70
Adafruit_AS5600 encoder1;
Adafruit_AS5600 encoder2;
#define BUFFER_SIZE 20
// IMU variables
float comp_angle = 0;
float gyro_angle = 0;
unsigned long lastTime = 0;
// Motor control
#define MOTOR_A_FWD 9
#define MOTOR_A_BACK 8
#define MOTOR_B_FWD 10
#define MOTOR_B_BACK 7
#define OFF 0
#define FORWARD 1
#define BACKWARD -1
#define RIGHT 2
#define LEFT 3
#define STOP 0
// PWM setup
mbed::PwmOut pwmPinA1(digitalPinToPinName(MOTOR_A_FWD));
mbed::PwmOut pwmPinA2(digitalPinToPinName(MOTOR_A_BACK));
mbed::PwmOut pwmPinB1(digitalPinToPinName(MOTOR_B_FWD));
mbed::PwmOut pwmPinB2(digitalPinToPinName(MOTOR_B_BACK));
// PID
float KP = 8.5, KI = 40.0, KD = 0.525;
#define ZERO_ANGLE -2.4
float targetAngle = ZERO_ANGLE;
float currentError = 0.0, lastError = 0.0, lastAngle = 0.0;
float propTerm = 0.0, intTerm = 0.0, derivTerm = 0.0;
float pidControlSignal = 0.0;
float maxIntegralLimit = 0.0, minIntegralLimit = 0.0;
float positionIntegral = 0.0;
float lastPositionError = 0.0;
const float POSITION_KP = 0.002; // tune these
const float POSITION_KI = 0.0001;
const float POSITION_KD = 0.0005;
// === Position Hold Additions ===
float wheel1Pos = 0.0, wheel2Pos = 0.0;
float lastAngle1 = 0.0, lastAngle2 = 0.0;
// ================================
// BLE setup
BLEService customService("00000000-5EC4-4083-81CD-A10B8D5CF6EC");
BLECharacteristic customCharacteristic("00000001-5EC4-4083-81CD-A10B8D5CF6EC", BLERead | BLEWrite | BLENotify, BUFFER_SIZE, false);
// TCA helper
void tcaSelect(uint8_t i) {
if (i > 7) return;
Wire.beginTransmission(TCA_ADDR);
Wire.write(1 << i);
Wire.endTransmission();
}
// Init mode
static char mode[5];
void updateMode(const char* receivedString) {
strncpy(mode, receivedString, sizeof(mode) - 1);
mode[sizeof(mode) - 1] = '\0';
}
void setup() {
Serial.begin(115200);
Wire.begin();
delay(100);
// Init TCA + Encoders
tcaSelect(5);
delay(10);
if (!encoder1.begin()) {
Serial.println("AS5600 not detected on channel 1!");
while (1);
} else {
Serial.println("AS5600 detected on channel 1.");
}
tcaSelect(2);
delay(10);
if (!encoder2.begin()) {
Serial.println("AS5600 not detected on channel 2!");
while (1);
} else {
Serial.println("AS5600 detected on channel 2.");
}
// BLE
pinMode(LED_BUILTIN, OUTPUT);
if (!BLE.begin()) {
Serial.println("Starting BLE failed!");
while (1);
}
BLE.setLocalName("BLE-GROUP9");
BLE.setDeviceName("BLE-GROUP9");
customService.addCharacteristic(customCharacteristic);
BLE.addService(customService);
customCharacteristic.writeValue("Waiting for data");
BLE.advertise();
Serial.println("Bluetooth® device active, waiting for connections...");
// IMU
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
// PWM
const int frequency = 200;
const int frequencyB = 200;
pwmPinA1.period(1.0 / frequency);
pwmPinA2.period(1.0 / frequency);
pwmPinB1.period(1.0 / frequencyB);
pwmPinB2.period(1.0 / frequencyB);
lastTime = micros();
// Initialize encoder angles tracking variables:
tcaSelect(5);
lastAngle1 = encoder1.getAngle();
tcaSelect(2);
lastAngle2 = encoder2.getAngle();
// Initialize wheel positions
wheel1Pos = 0.0;
wheel2Pos = 0.0;
}
static char prevMode[5] = "";
void loop() {
BLEDevice central = BLE.central();
char receivedString[5];
if (central) {
if (customCharacteristic.written()) {
const unsigned char* receivedData = customCharacteristic.value();
memcpy(receivedString, receivedData, 5);
receivedString[4] = '\0';
Serial.print(" Received data: ");
Serial.print(receivedString);
updateMode(receivedString);
Serial.print(" Mode: ");
Serial.print(mode);
customCharacteristic.writeValue("Data received");
}
} else {
digitalWrite(LED_BUILTIN, LOW);
}
checkSerialCommands();
float ax, ay, az, gx, gy, gz;
if (IMU.accelerationAvailable() && IMU.gyroscopeAvailable()) {
IMU.readAcceleration(ax, ay, az);
IMU.readGyroscope(gx, gy, gz);
float accelerometerAngle = atan2(ay, az) * 180.0 / PI;
unsigned long currentTime = micros();
float dt = (currentTime - lastTime) / 1000000.0;
lastTime = currentTime;
// Kalman Filter
static float currentAngle = 0.0f;
static float errorCovariance = 4.0f;
const float GYRO_NOISE = 0.003f, ACC_NOISE = 0.03f;
const float KALMAN_UPDATE_FACTOR = 1.0f;
currentAngle = currentAngle - gx * dt;
errorCovariance += dt * dt * GYRO_NOISE * GYRO_NOISE;
float adaptiveWeight = errorCovariance / (errorCovariance + ACC_NOISE * ACC_NOISE);
currentAngle += adaptiveWeight * (accelerometerAngle - currentAngle);
errorCovariance *= (KALMAN_UPDATE_FACTOR - adaptiveWeight);
comp_angle = currentAngle;
// PID
const float UPPER_BOUND = 1000.0, LOWER_BOUND = -1000.0;
currentError = targetAngle - currentAngle;
Serial.print(" | targetAngle: ");
Serial.print(targetAngle);
propTerm = KP * currentError;
derivTerm = -1 * KD * (currentAngle - lastAngle) / dt;
float pdTerm = propTerm + derivTerm;
if (KI != 0.0) {
intTerm += (KI * dt) * (currentError + lastError) / 2.0;
maxIntegralLimit = UPPER_BOUND - pdTerm;
minIntegralLimit = LOWER_BOUND - pdTerm;
intTerm = constrain(intTerm, minIntegralLimit, maxIntegralLimit);
} else intTerm = 0.0;
pidControlSignal = constrain(propTerm + derivTerm + intTerm, LOWER_BOUND, UPPER_BOUND);
lastAngle = currentAngle;
lastError = currentError;
int direction = (pidControlSignal > 0) ? FORWARD : BACKWARD;
float pwm = constrain(abs(pidControlSignal) / 300.0, 0.0, 1.0);
// === AS5600 angle reads ===
// Seems to go from 0 to 4096 per wheel raw TCA values
const float FULL_SCALE = 4096.0;
const float HALF_SCALE = FULL_SCALE / 2.0;
tcaSelect(5);
float angle1 = encoder1.getAngle();
tcaSelect(2);
float angle2 = encoder2.getAngle();
// Compute delta and handle wrap-around
float delta1 = angle1 - lastAngle1;
float delta2 = angle2 - lastAngle2;
if (delta1 > HALF_SCALE) delta1 -= FULL_SCALE;
if (delta1 < -HALF_SCALE) delta1 += FULL_SCALE;
if (delta2 > HALF_SCALE) delta2 -= FULL_SCALE;
if (delta2 < -HALF_SCALE) delta2 += FULL_SCALE;
wheel1Pos += delta1;
wheel2Pos += delta2;
lastAngle1 = angle1;
lastAngle2 = angle2;
float avgWheelPos = (wheel1Pos + wheel2Pos) / 2.0;
Serial.print(" | wheel1: ");
Serial.print(wheel1Pos);
Serial.print(" | wheel2: ");
Serial.print(wheel2Pos);
static float leftMultiplier = 1.0, rightMultiplier = 1.0;
// Target Angle in different modes
if (strcmp(mode, "FRWD") == 0) targetAngle = ZERO_ANGLE + 1.25;
else if (strcmp(mode, "BACK") == 0) targetAngle = ZERO_ANGLE - 2.0;
else if (strcmp(mode, "RGHT") == 0 || strcmp(mode, "LEFT") == 0) targetAngle = ZERO_ANGLE;
// STOP MODE
// Inside your loop STOP mode:
else {
// STOP mode PID Loop
float positionError = avgWheelPos; // positive error for positive correction
// Calculate dt safely:
unsigned long currentTime = micros();
float dt = (lastTime == 0) ? 0 : (currentTime - lastTime) / 1000000.0;
lastTime = currentTime;
if (dt <= 0) dt = 0.001; // fallback small dt
// Integral term update with clamping
positionIntegral += positionError * dt;
// Anti-windup clamping
const float MAX_POSITION_INTEGRAL = 1000.0; // adjust as needed
positionIntegral = constrain(positionIntegral, -MAX_POSITION_INTEGRAL, MAX_POSITION_INTEGRAL);
// Derivative term
float positionDerivative = (positionError - lastPositionError) / dt;
lastPositionError = positionError;
// PID control
float positionCorrection = POSITION_KP * positionError
+ POSITION_KI * positionIntegral
+ POSITION_KD * positionDerivative;
targetAngle = ZERO_ANGLE + positionCorrection;
// Clamp targetAngle to safe limits [-1.5, 1.5]
targetAngle = constrain(targetAngle, ZERO_ANGLE - 1.5, ZERO_ANGLE + 1.5);
// PID Loop to control wheel sync differential
static float syncErrorIntegral = 0.0;
static float lastSyncError = 0.0;
float syncError = wheel1Pos - wheel2Pos;
Serial.print(" | syncError: ");
Serial.print(syncError);
syncErrorIntegral += syncError * dt; // dt: time since last loop
float syncErrorDerivative = (syncError - lastSyncError) / dt;
lastSyncError = syncError;
// PID gains — tweak these based on testing
const float SYNC_KP = 0.0005;
const float SYNC_KI = 0.0;
const float SYNC_KD = 0.0001;
float syncCorrection = SYNC_KP * syncError
+ SYNC_KI * syncErrorIntegral
+ SYNC_KD * syncErrorDerivative;
// Apply correction symmetrically
leftMultiplier -= syncCorrection;
rightMultiplier += syncCorrection;
}
// Detect mode change
bool modeChanged = strcmp(mode, prevMode) != 0;
if (modeChanged) {
Serial.print("RESETTING POSITION PID ");
if (strcmp(mode, "STOP") == 0)
{
// Reset position PID
positionIntegral = 0.0;
lastPositionError = 0.0;
// Reset sync PID too 👇
syncErrorIntegral = 0.0;
lastSyncError = 0.0;
// Wheel positions reference
wheel1Pos = 0.0;
wheel2Pos = 0.0;
}
strcpy(prevMode, mode);
}
float turnRateR = 1.0;
float turnRateL = 1.0;
// Turning PWM scale
if (strcmp(mode, "RGHT") == 0) {
turnRateL = 0.8;
turnRateR = 1.0;
} else if (strcmp(mode, "LEFT") == 0) {
turnRateL = 1.0;
turnRateR = 0.8;
} else if (
strcmp(mode, "FRWD") == 0 ||
strcmp(mode, "BACK") == 0 || strcmp(mode, "STOP") == 0
) {
turnRateL = 1.0;
turnRateR = 1.0;
}
// Balancing Logic
if (abs(comp_angle) < 30.0)
{
if (direction == FORWARD) {
float pwmLeft = constrain(pwm * leftMultiplier * turnRateL, 0.0, 1.0);
float pwmRight = constrain(pwm * rightMultiplier * turnRateR, 0.0, 1.0);
pwmPinA1.write(pwmLeft);
pwmPinB1.write(pwmRight);
pwmPinA2.write(0.0);
pwmPinB2.write(0.0);
}
else
{
float pwmLeft = constrain(pwm * leftMultiplier*turnRateL, 0.0, 1.0);
float pwmRight = constrain(pwm * rightMultiplier*turnRateR, 0.0, 1.0);
pwmPinA1.write(0.0);
pwmPinB1.write(0.0);
pwmPinA2.write(pwmLeft);
pwmPinB2.write(pwmRight);
}
}
else
{
pwmPinA1.write(OFF); pwmPinB1.write(OFF);
pwmPinA2.write(OFF); pwmPinB2.write(OFF);
}
Serial.print(" | Angle1: ");
Serial.print(angle1);
Serial.print(" | Angle2: ");
Serial.println(angle2); // Final println
}
}
// === Serial PID Tuning Commands ===
void checkSerialCommands() {
if (Serial.available()) {
String cmd = Serial.readStringUntil('\n');
cmd.trim();
if (cmd.startsWith("KP=")) KP = cmd.substring(3).toFloat();
else if (cmd.startsWith("KI=")) KI = cmd.substring(3).toFloat();
else if (cmd.startsWith("KD=")) KD = cmd.substring(3).toFloat();
else if (cmd == "SHOW") {
Serial.print("KP="); Serial.println(KP);
Serial.print("KI="); Serial.println(KI);
Serial.print("KD="); Serial.println(KD);
Serial.println("====================");
}
}
}
Click to show Python code
| display.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 | |
Simulink Control System for SpO₂ Regulation (2026 March - 2026 April)
- Designed a PI-based control system in MATLAB/Simulink to regulate blood oxygen saturation (SpO₂) via FiO₂ under delay, nonlinearity, and disturbances (HR, RR).
- Implemented feedforward compensation, anti-windup, dead zone, and filtering to improve stability and robustness.
- Maintained SpO₂ within 90–94% and respected FiO₂ safety constraints during disturbances and transients.
- Validated performance across varying plant parameters, demonstrating strong robustness to patient variability.
Click for more details
Control System - PID controller (P, I, D tuned experimentally) - Anti-windup and output saturation handling - Stable real-time loop timing
Hardware / Integration - Sensor input processing (filtered to reduce noise) - PWM motor control from PID output - Embedded C/C++ implementation on microcontroller
Performance - Reduced oscillations and steady-state error - Fast settling time with stable tracking - Robust under varying conditions